Back to Tech Lab
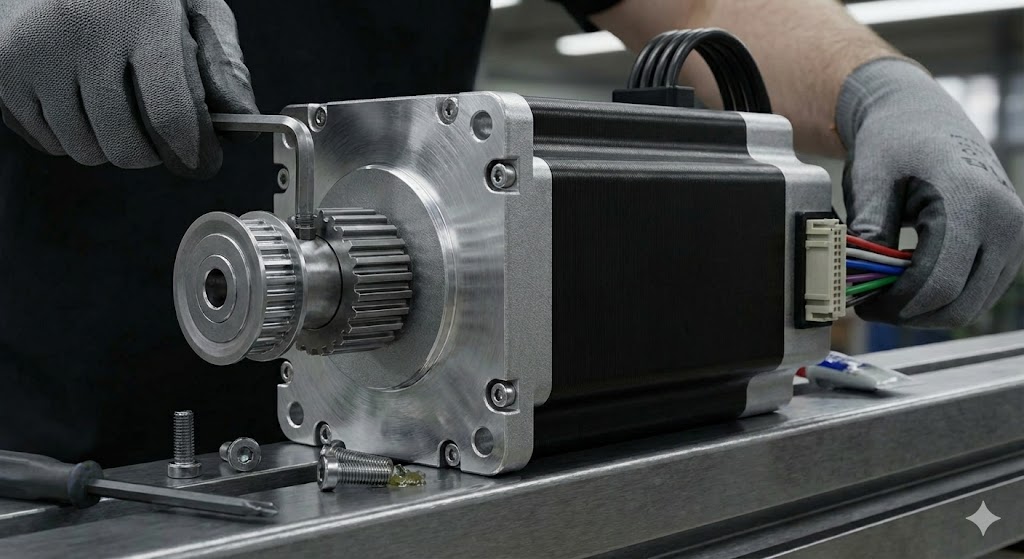
Precision Stepper
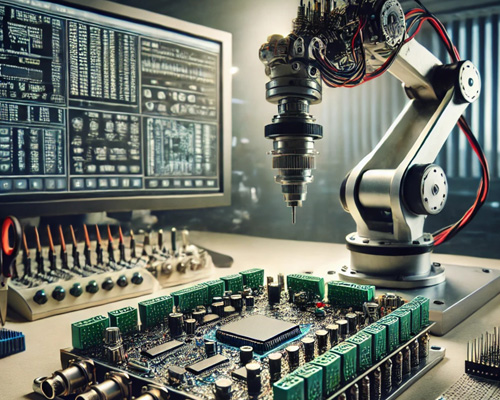
Completed Project
Precision Stepper
Motor Controller
A high-accuracy multi-axis stepper motor controller engineered for robotic arm applications, featuring microstepping, closed-loop feedback, and real-time trajectory planning.
6
Motor Axes
256
Microsteps
0.01mm
Precision
11
Weeks to Build